
打开文本图片集
摘要:主梁是桥式起重机的重要组成部分及主要受力元件。为防止发生生产事故,需采集起重机主梁受力数据进行主梁寿命分析。设计了基于虚拟仪器的桥式起重机主梁应变采集系统。系统硬件主要包括传感器、连接器、数据采集卡、无线数据传输组、POE供电器和上位机。软件部分包括访问计算机中NI软硬件资源的接口软件NI MAX和进行主梁应变数据显示、存储的LabVIEW程序设计。通过该系统对50/10 t桥式起重机主梁进行多位置、多工作日应变数据连续采集,得到主梁关键位置受力数据。运行结果表明,该主梁应变采集系统运行稳定,各通道任务信号准确,采集终端存储数据完整,满足测试任务要求,为后续主梁疲劳分析、准确预测该起重机主梁剩余使用寿命提供了重要数据支持。
关键词:数据处理;主梁;虚拟仪器;LabVIEW;数据采集
中图分类号:TP274文献标志码:A
刘文学, 闫龙, 赵少鹏.基于虚拟仪器的桥式起重机主梁应变采集系统设计[J].河北科技大学学报,2015,36(1):5862.
LIU Wenxue, YAN Long, ZHAO Shaopeng.Design of bridge crane girder strain acquisition system based on virtual instrument[J].Journal of Hebei University of Science and Technology,2015,36(1):5862.桥式起重机是在固定跨间内装卸和搬运物料的一种机械设备,能减轻笨重体力劳动,提高作业效率,主要用于大型加工企业,如钢铁、冶金、建材等行业,被称为工业企业的“脊梁”[12]。主梁是桥式起重机的重要组成部分,也是主要的受力元件。在高载荷、高频率的工作过程中,主梁易发生疲劳受损,而疲劳受损的不断累积最终可能造成疲劳失效。一般情况下疲劳失效发生突然,易造成安全事故和经济损失,而主梁疲劳失效通常也意味着整台桥式起重机寿命终结[34]。因此在桥式起重机使用过程中监测主梁关键位置受力情况,采集主梁受力数据进行疲劳分析,对于保障人身财产安全、提高起重机使用寿命具有重要意义。
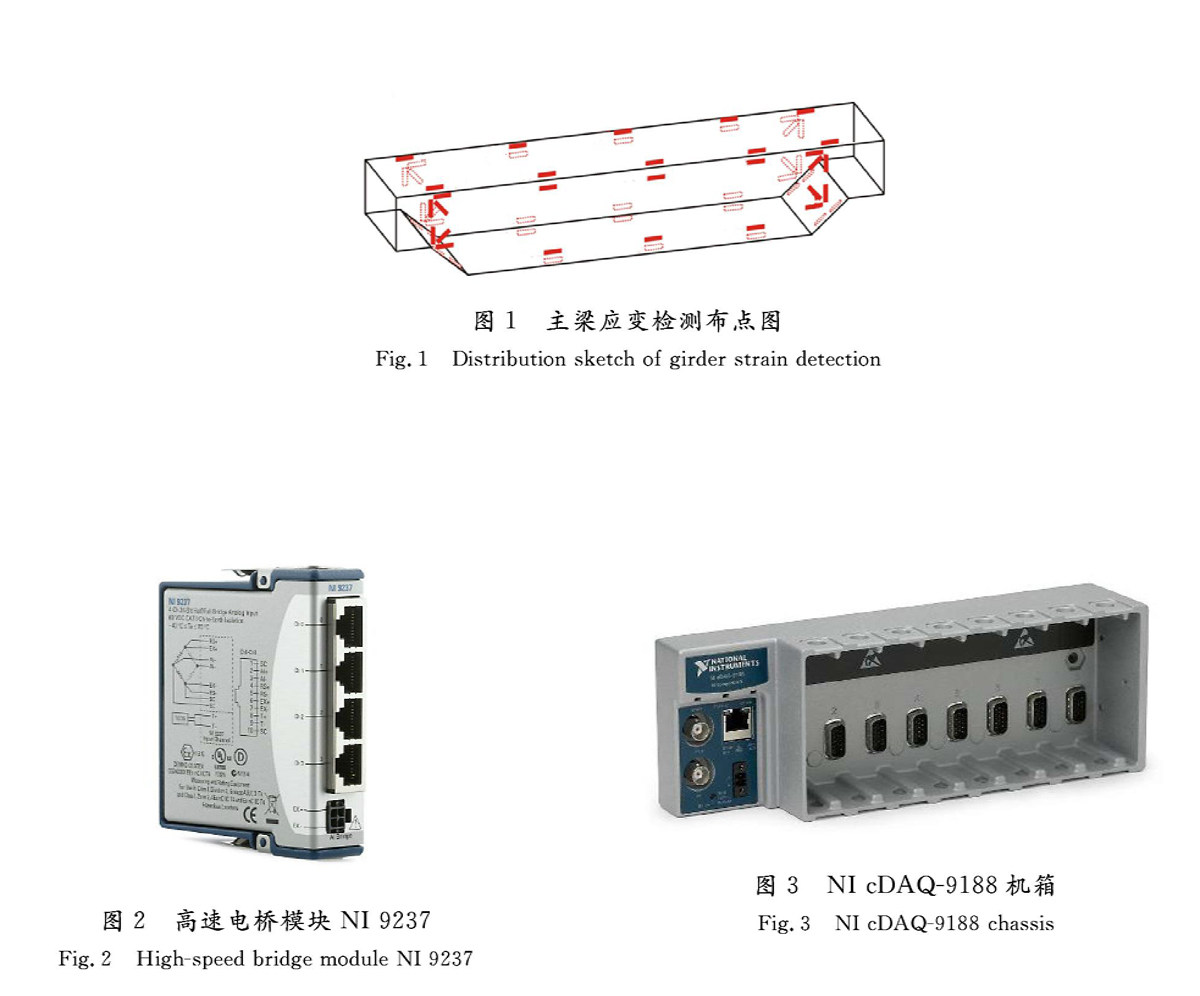
图1主梁应变检测布点图
Fig.1Distribution sketch of girder strain detection
本文研究对象为某钢厂所用50/10 t桥式起重机,主梁跨度13 m,主梁应变检测布点见图1。通过ANSYS Workbench对该起重机主梁进行多工况有限元分析,得到主梁各工况应力云图、变形云图。分析结果表明主梁两端变截面处存在应力集中,上、下盖板与腹板连接处应力值亦较大,这些区域易在起重机使用过程中产生疲劳破坏,应在后续贴片检测中设置测点。
1系统硬件设计
NI cDAQ(national instrument compact data acquisition)是由NI公司推出的独立式数据采集系统,包含机箱、NI C系列I/O模块及软件,可满足任何电子或传感器测量系统的需求[56]。本文以NI cDAQ为基础设计了起重机主梁应变采集系统,实现主梁受力实时采集以及数据连续存储,能够满足起重机主梁疲劳分析中对于关键位置应变数据采集的要求。
起重机主梁应变采集系统包括数据采集模块、数据传输模块和数据接收模块3部分。
1.1数据采集模块
数据采集模块包括传感器、连接器和数据采集卡,是采集系统的最前端,是保障主梁应变数据采集准确性的关键。
传感器:在应变测量中,薄导体应变片粘贴在受力物体表面,可将被测对象的变形转换为电阻值变化。本次主梁受力采集传感器选用单轴电阻应变片,阻值为120 Ω,泊松比为0.3。为减小系统误差,应选取同一品牌、同一批次应变片。
连接器:应变片与数据采集卡之间为适配器和RJ50线缆,该连接器为数据采集卡配套元件。
数据采集卡:系统数据采集卡采用NI公司生产的C系列I/O高速电桥模块NI 9237(见图2),该模块为4通道、±25 mV、24位分辨率,最高采样速率达50 kS/s,半桥和全桥完整编程,内部激励可达10 V,可兼容智能传感器[7]。
因本次测试任务对主梁多位置点进行应变数据采集,系统包含多个数据采集卡,故选用NI cDAQ9188机箱(见图3)。NI cDAQ9188是一款8槽以太网机箱,适合远程或分布式测量,可同时运行多个硬件定时模拟I/O、数字I/O或计数器/定时器操作。单个NI cDAQ9188机箱可测量最多256路通道的电子、物理、机械或声音信号。
图2高速电桥模块NI 9237
Fig.2Highspeed bridge module NI 9237图3NI cDAQ9188机箱
Fig.3NI cDAQ9188 chassis1.2数据传输模块
钢厂车间环境复杂,起重机处于高频率、高载荷工作状态,如将计算机等采集设备完全置于起重机上,既不便于操作人员进行主梁受力检测,又易造成测试设备损坏。由于采集端与主梁测点线缆连接,必然置于起重机上,故可将上位机置于安全区域。实验发现,当采集端计算机距主梁测点较远时,线缆电阻对于测试信号影响明显,数据采集结果可信度降低,且生产现场不宜大量长距离布线,综合考虑决定采用无线数据传输方式。
图4无线基站AT5150
Fig.4Wireless base station AT5150
本次无线数据传输系统由4个高速无线数据采集基站AT5150(air terminal5150,见图4)组成。该基站具有高稳定性、高速率、使用距离远、抗干扰能力强及支持多地点同时采集等优点,其带宽可达150 M,因此可满足高数据量的传输。每个AT5150无线基站在网络中有2个模式可选:当用作数据采集接收端时,与PC机相连,即选择Access Point模式;当用作数据发射端时,和数据采集卡相连,即作为Station使用。
根据主梁检测布点设置,本次数据传输系统包括3个数据发射站和1个数据接收站。在软件网络中设置不同IP地址确定发射端和接收端,保障系统软件、硬件正确识别。
1.3数据接收模块
数据接收端指安装有虚拟仪器系列软件的计算机设备,即上位机。采集数据通过无线数据发射端传至数据接收端,到达上位机。根据测点线路和NI 设备检测任务通道编号,上位机界面可显示各通道任务信号图谱,并连续保存该任务数据。数据采集功能模块布置如图5所示。
图5无线数据采集系统
Fig.5Wireless data acquisition system
2系统软件设计
虚拟仪器(virtual instrument, VI)就是在以通用计算机为核心的硬件平台上,由用户设计定义,具有虚拟面板,测试功能由测试软件实现的一种计算机仪器系统,其实质就是利用计算机显示、模拟传统仪器的控制面板,以多种形式来表达输出检测结果,利用计算机实现数据运算、分析和处理,利用I/O接口设备完成信号采集、测量与调理,进而完成测试任务的计算机仪器系统[810]。
主梁受力采集系统软件包括NI MAX和LabVIEW两部分。
NI MAX(measurement & automation explorer)测试与自动化资源管理器,是访问计算机中NI软硬件资源的接口软件,具有执行系统测试和诊断、增加新通道和虚拟通道、设置测量方式以及查看连接设备等功能[1112]。
图6NI MAX参数设置
Fig.6NI MAX parameters
主梁测试任务过程:首先,在NI MAX中建立主梁受力测试任务,选择任务测试类型、模拟输入,此处是“应变”;其次,根据测点数量、编号,选择相应数据采集卡虚拟通道,通道任务可自主命名,也可选择系统默认任务名称;最后,如图6所示在数据采集助手对话框中设置测试任务相关任务参数,包括应变片阻值、泊松比、应变配置桥路、采集模式、待读取采样和采样率等。
任务设置完成,需对系统进行应变校准。应变校准是指采集应变数据前板卡所做的零点及分流校准,其目的是纠正NI 9237系统增益误差。
由于NI MAX只能实现信号数据实时显示、读取,不能满足数据连续存储的要求,而本次主梁应变数据采集系统设计的目的是通过主梁关键位置受力数据连续采集、存储,通过疲劳算法对此数据进行疲劳分析,最终判断该主梁的疲劳寿命,因此主梁受力数据准确、完整保存非常重要。此处,选择虚拟仪器LabVIEW编程实现数据连续存储和其他功能。
LabVIEW由前面板和程序框图2部分组成。前面板是图形化用户操作、显示界面,用于设置输入值和观察值;程序框图用于编写程序代码,通常由节点、端口和数据连线组成。
图7主梁应变采集系统主程序
Fig.7Main program of the girder strain acquisition system系统程序如图7所示,采集程序整体为while循环,主要由DAQmx配置模板、DAQmx开始任务、DAQmx读取、DAQmx清除任务等组成,可实现NI MAX中多通道测试任务数据的实时读取和连续存储。
“DAQmx读取”控件是采集程序的核心。根据本次测试任务的特点,多态VI选择器选择模拟1D波形N通道N采样,图8为该VI控件图标和接线端子,任务/通道输入与DAQmx开始任务输出端相连。在通道采样数端前创图8DAQmx读取控件
Fig.8DAQmx read control
建输入控件,可根据测试任务采集数据频率设置采样数。超时指定了采样待读取的时间,单位为s。如超时,该步骤将返回错误和超时前读取的所有采样。系统默认超时时间为10 s。在DAQmx读取数据端创建“data”波形图表,程序读取数据显示在前面板波形图中。
程序末端采用布尔运算“或”方式,即当按下“停止”按钮或者系统状态布尔量status输入错误时,while循环将停止。当程序循环读取停止时,使用DAQmx清除任务[1315]。
使用NI产品时应注意,软件、硬件安装完成,在进行相关测试任务前,应单独安装专门驱动NI数据采集卡的软件包NI DAQ,否则将出现数据采集卡无信号以及LabVIEW内部函数“测试I/O”中无DAQmx数据采集控件的情况。本次使用LabVIEW 版本为 NI LabVIEW 2013,驱动版本为NI DAQ975f1。
3结语
本文基于 NI cDAQ硬件平台和LabVIEW,NI MAX软件系统,设计了桥式起重机主梁多通道应变数据采集系统,实现了数据实时采集和连续存储。测试过程中,各通道数据传输信号稳定,数据库保存完整,满足主梁疲劳寿命分析要求。准确、完整的数据支持为主梁受力关键区域检测、疲劳危险位置修复以及科学预测该起重机主梁疲劳寿命提供了重要依据。
参考文献/References:
[1]张质文,虞和谦,王金诺,等.起重机设计手册[M].北京:中国铁道出版社,1998.
ZHANG Zhiwen,YU Heqian,WANG Jinnuo,et al.Crane Design Manual[M].Beijing: Chinese Railway Publishing House,1998.
[2]左治兴,朱必勇,孙学森,等.桥式起重机典型事故分析及安全管理[J].工业安全与环保,2006,32(10): 4952.
ZUO Zhixing,ZHU Biyong,SUN Xuesen,et al.Analysis on bridge tramway typical accident and safety management[J].Industrial Safety and Environmental Protection,2006,32(10): 4952.
[3]高素荷.宝钢25 t27.5 m桥式起重机主梁有限元分析[J].工程设计学报,2005,12(5): 6367.
GAO Suhe.Finite element analysis of Baosteel 25 t27.5 m bridge crane girder[J].Journal of Engineering Design,2005,12 (5): 6367.
[4]刘玉峰.基于ANSYS的桥式起重机结构力学性能分析及优化[D].西安:西安建筑科技大学,2012.
LIU Yufeng.The Analysis of Mechanical Properties and Optimum of Overhead Crane Structure Based on ANSYS[D].Xi’an: Xi’an University of Architecture and Technology,2012.
[5]马长李,廖剑.基于cDAQ的数字电路板功能测试系统设计[J].计算机与数字工程,2011,39(10): 101103.
MA Changli,LIAO Jian.Design of fundation testing for digital circuit test system based on C#.NET[J].Computer & Digital Engineering,2011,39(10): 101103.
[6]美国国家仪器公司.独立式NI CompactDAQ系统简介[J].电子测量技术,2012,35(8): 1719.
American International Equipment Company.Introduction of the independent NI CompactDAQ system[J].Test & Measurement Solution,2012,35(8): 1719.
[7]房晓文.起重机车架测试系统的研究与开发[D].武汉:华中科技大学,2012.
FANG Xiaowen.Research and Development of the Test System of the Crane Frame[D].Wuhan: Huazhong University of Science and Technology,2012.
[8]王立新,李荣廷.基于虚拟仪器LabVIEW的发动机台架试验数据采集系统设计[J].河北科技大学学报,2014,35(2): 109117.
WANG Lixin,LI Rongting.Design of engine testbed experiment data acquisition system based on virtual instrument LabVIEW[J].Journal of Hebei University of Science and Technology,2014,35(2): 109117.
[9]史君成,张淑伟,律淑珍.LabWindows虚拟仪器设计[M].北京:国防工业出版社,2007.
SHI Juncheng,ZHANG Shuwei,LYU Shuzhen.LabWindows Virtual Instrument Design[M].Beijing: National Defence Industry Press,2007.
[10]李涛,雷万忠.基于LabVIEW的数据采集系统研究[J].工矿自动化,2010 (11): 121124.
LI Tao,LEI Wanzhong.Research of data acquisition system based on LabVIEW[J].Industry and Mine Automation,2010(11): 121124.
[11]雷震山.LabVIEW8.2基础教程[M].北京:中国铁道出版社,2008.
LEI Zhenshan.LabVIEW8.2 Basis Course[M].Beijing: Chinese Railway Publishing House,2008.
[12]刘金刚,涂宇,朱建林.挖掘机工作装置测控系统的虚拟仪器化[J].湘潭大学自然科学学报,2013,35(2): 7579.
LIU Jingang,TU Yu,ZHU Jianlin.Virtual instrument in the manipulator of excavator and control system[J].Natural Science Journal of Xiangtan University,2013,35(2): 7579.
[13]王璨,章佳荣.LabVIEW 2011程序设计与案例解析[M].北京:北京航空航天大学出版社,2013.
WANG Can,ZHANG Jiarong.LabVIEW 2011 Programming and Cases Analysis[M].Beijing: Beihang University Press,2013.
[14] 韩琪.基于虚拟仪器的数据采集与分析系统研究与设计[D].北京:北京交通大学,2012.
HAN Qi.The Research and Design of Data Acquisition and Analysis System Based on Virtual Instrument[D].Beijing: Beijing Jiaotong University,2012.
[15]张荣.基于DAQmx驱动与LabVIEW的数据采集系统设计[J].计算机应用与软件,2011,28(3): 180181.
ZHANG Rong.Design of data acquisition system based on DAQmx and LabVIEW[J].Computer Application and Software,2011,28(3): 180181.河北科技大学学报2015年第1期方珩,等:一种新型纱线毛羽图像特征识别算法的研究第36卷第1期河北科技大学学报Vol.36,No.1
2015年2月Journal of Hebei University of Science and TechnologyFeb.2015